La Chirurgia robotica si riferisce a qualsiasi intervento chirurgico effettuato con una tecnologia computerizzata che è in grado di riprodurre i movimenti della mani del chirurgo in modo miniaturizzato all'interno del corpo umano o in qualsiasi campo chirurgico. L’integrazione tra 3D, strumentazione e sistema di controllo, supera i limiti della chirurgia tradizionale.
Il sistema da Vinci per la chirurgia robotica
Il sistema chirurgico da Vinci è formato da: la console del chirurgo, il carrello robotico, con 4 braccia robotiche articolate (una per la telecamera e 3 per lo strumentario robotico) ed è posizionato al tavolo operatorio in prossimità del paziente. Infine, l’unità mobile dove è posizionato un monitor per il team chirurgico, l'ottica e la sorgente di luce e l'insufflatore di CO2. Il sistema “da Vinci Si” ha la possibilità di affiancare una console aggiuntiva in grado di ospitare un secondo chirurgo (ad esempio un chirurgo tirocinante).
La console chirurgica è il centro di controllo del da Vinci. Tramite essa, posta fuori dal campo sterile, il chirurgo controlla l'endoscopio 3D e gli strumenti EndoWrist.
Il normale allineamento tra mani, occhi e strumenti, come avviene nella chirurgia tradizionale, nella chirurgia robotica è garantito dalla macchina il cui visore stereo permette anche la visualizzazione a schermo intero o quella di immagini multiple, nonché altre scansioni come quella dell’ecografo o dell’elettrocardiogramma.

Nella chirurgia robotica, le mani del chirurgo ai manipolatori sono in linea con le punte degli strumenti, nel visore stereo. Questo affinché possa essere simulato l’allineamento naturale tra occhi, mani e strumentazione. È possibile, inoltre, passare dalla visualizzazione a schermo a quella a più immagini.

L’immagine che il chirurgo vede nello schermo della console è ingrandita, in alta definizione e tridimensionale, grazie alle 2 minuscole telecamere montate su un unico strumento robotico (ottica) che viene introdotto nel campo chirurgico attraverso un trocar da laparoscopica; l'immagine è catturata e ricostruita dal computer che fornisce un’immagine perfetta.
Le mani del chirurgo muovono i master (o joystick) della console che inducono i movimenti sullo strumentario robotico; dopo un adeguato filtraggio software, tali movimenti vengono ottimizzati diminuendo il tremore, mantenendo un corretto rapporto tra lo spostamento dei master e dello strumentario robotico stesso. Nella chirurgia robotica è minimizzato anche il tremore fisiologico delle mani dell’operatore e i movimenti involontari.
Gli strumenti collegati alle braccia robotiche (pinze, forbici, applicatore di clip, diversi tipi di graspers e dissettore ad ultrasuoni) sono intercambiabili secondo le esigenze del chirurgo e dell’intervento che viene eseguito.
La console, per motivi pratici, è posta all'interno della stessa sala operatoria ed è collegata al carrello robotico tramite un cavo a fibre ottiche. Tale collegamento potrebbe potenzialmente essere fatto a distanze più lunghe (diverso ospedale, città o paese); in questi casi l'unica limitazione è l’elevatissimo costo della connessione e il ritardo tra la trasmissione di immagini e la risposta, seppur minima, del movimento del chirurgo.
Il carrello paziente, parte operativa di da Vinci, è formato da quattro braccia per il supporto degli strumenti e dell’endoscopio.
La comunicazione verbale tra il chirurgo e il team chirurgico al tavolo operatorio può avvenire direttamente o tramite un sistema di microfono incorporato nella console che può trasmettere agli altoparlanti in sala operatoria. Nel campo sterile, il secondo operatore coadiuva il chirurgo alla console e ha precedenza assoluta nel garantire la sicurezza del paziente. Qualsiasi problema si verificasse durante la procedura di chirurgia robotica, la squadra al tavolo operatorio può scollegare il robot e proseguire la procedura in un modo convenzionale (per via laparoscopica o tradizionale “aperta”). Il tasso di conversione dipende dalla difficoltà tecnica dell’intervento che si sta effettuando e dall'esperienza del chirurgo. Esso varia tra l’1% - per la chirurgia robotica prostatica - e il 6-10% per la chirurgia robotica pancreatica, particolarmente complessa. La conversione per guasti dell’apparecchiatura robotica è un evento estremamente raro. Non esiste morbilità specifica legata al robot diversa da quella relativa all’approccio laparoscopico.
Il carrello visione consta di un monitor, di un elettrobisturi e di mensole su cui poggiare altre strumentazioni. da Vinci è dotato anche di un video full HD. Questa sezione fornisce particolari sui seguenti componenti del carrello visione:
- Sistema elettronico (Core): elabora l’immagine video
- Controller endoscopio: contiene una sorgente luminosa ad alta intensità per illuminare il sito chirurgico e l’elettronica di elaborazione dell’immagine rilevata dall’endoscopio.
- Video processore: riceve e processa l’input video dall’endoscopio e lo invia attraverso l’elettronica di sistema al touchscreen e al visore 3D.
- Endoscopi: il sistema di visione ad alta definizione da Vinci utilizza endoscopi a punta obliqua o diritta. La luce guida e i segnali di comunicazione dell’endoscopio sono fissato all’endoscopio all’inizio dell’intervento. Il cavo dell’endoscopio si collega direttamente al carrello visione per fornire comunicazione e illuminazione. Il calore proveniente dalle fibre ottiche aiuta a minimizzare l'appannamento delle lenti dell'endoscopio.
L’elaborazione dell’immagine proveniente dai canali sinistro e destro consente la visione tridimensionale in console.
- Touchscreen con una serie di comandi per l’endoscopio e le configurazioni video.
- Portabombole ossigeno.
- Ripiani ausiliari: ripiani regolabili per attrezzature chirurgiche ausiliarie opzionali, come gli insufflatori.
- Elettrobisturi: elettrobisturi integrato per l’attivazione di strumenti robotici e laparoscopici
monopolari e bipolari.
Strumenti Endowrist
Caratteristica principale è il polso che garantisce il movimento libero impossibile per la mano dell’uomo. A disposizione del robot c’è poi una serie variegata di strumenti.
Endoscopi in chirurgia robotica
Il sistema visione ad alta definizione (HD) da Vinci Xi è compatibile con endoscopi dedicati da 30° e da 0° con diametro da 12 mm. L’endoscopio acquisisce un video tridimensionale in alta definizione (3D HD) del sito chirurgico. Il video 3D viene elaborato dall’elettronica di sistema nel carrello visione e visualizzato sul visore 3D della console chirurgica e sul touchscreen del carrello visione.
Applicazioni cliniche della chirurgia robotica
La chirurgia robotica, con sistema da Vinci, è applicata maggiormente alle seguenti specialità:
Urologia
Chirurgia Generale
Ginecologia
Chirurgia Toracica
Cardiochirurgia
Nell'ultimo decennio, la chirurgia robotica ha dimostrato di essere fattibile in molte procedure chirurgiche, espandendo il campo della chirurgia minimamente invasiva. La sua diffusione è stata variabile a seconda di vari fattori, tra cui il rapporto costo-efficacia e la curva di apprendimento legata alle differenti procedure.
Alcune procedure, come la prostatectomia robotica, hanno vantato una diffusione molto rapida. Nel 2009 sono state effettuate 80mila prostatectomie robotiche negli Stati Uniti. I risultati oncologici e funzionali dopo prostatectomia robotica sono stati eccellenti, in modo tale che nel campo urologico, la chirurgia robotica ha guadagnato il pieno consenso anche verso altre procedure, come le nefrectomie parziali, cistectomie e pieloplastiche.
Il secondo uso più comune della chirurgia robotica è in ginecologia. Questa tecnica è stata accettata tra le donne per i suoi risultati estetici molto favorevoli e tra chirurghi per il superamento delle difficoltà di eseguire la chirurgia laparoscopica convenzionale all'interno dello stretto spazio pelvico.
La diffusione della robotica in chirurgia generale è avvenuta in modo più lento e progressivo ma la piattaforma robotica è notevolmente vantaggiosa in varie procedure complesse (interventi sul fegato e pancreas, interventi sul colon-retto e sullo stomaco) che vengono effettuati da una minoranza di chirurghi generali.
Per tali procedure complesse la curva di apprendimento è estremamente lunga e impegnativa. I risultati chirurgici finora ottenuti dimostrano tuttavia che le complicazioni in chirurgia esofagea, pancreatica, epatica e colo-rettale sono diminuite e che il robot permette di effettuare in modo sicuro e minimamente invasivo una maggiore varietà di procedure per un maggior numero di chirurghi.
Ultimamente, la chirurgia robotica colo-rettale ha guadagnato crescente popolarità: in particolare, vi sono evidenze che il trattamento robotico del cancro rettale abbia risultati migliori nella conservazione della funzione urinaria e sessuale rispetto alla chirurgia laparoscopica e open tradizionale. Inoltre la percentuale di conversione in “chirurgia aperta” durante l’intervento stesso è molto più bassa rispetto alla chirurgia laparoscopica con un’incidenza praticamente uguale a zero.
Altri campi in cui è applicata la chirurgia robotica sono la chirurgia endocrina (adrenalectomia e tiroidectomia transascellare); la timectomia robotica, le resezioni transorali di lesioni mucose delle vie respiratorie superiori nel campo dell’otorinolaringoiatria. La cardiochirurgia, che ha introdotto l'utilizzo del robot, ha successivamente trovato alcune difficoltà, dovute al fatto che alcune procedure sono state per lo più sostituite dal trattamento mini invasivo percutaneo, mentre by pass multipli sono tecnicamente estremamente difficili soprattutto per quanto riguarda l’accesso alla parte posteriore del cuore.
Dal 2000 sono stati eseguiti più di 1 milione di procedure robotiche nel mondo.
Il primo sistema robotico da Vinci (IS1200) chiamato Standard fu introdotto sul mercato nel 1998 e in Italia nel 1999 mentre nel 2006, è stato prodotto il sistema da Vinci S (IS2000). La versione da Vinci SI HD (IS3000) è stata introdotta sul mercato internazionale e nazionale nel 2009. Nel 2014, Intuitive Surgical ha lanciato il modello da Vinci Xi HD (IS4000). A fine 2013 risultano installati nel mondo quasi 3000 sistemi da Vinci di diverse configurazioni.
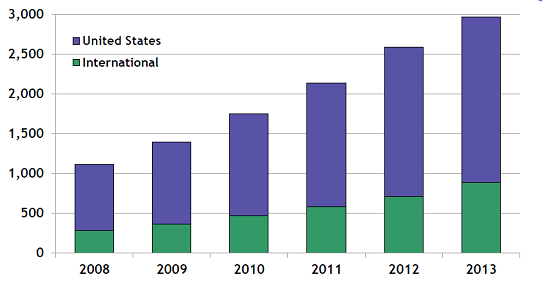
Nell’immagine la distribuzione delle installazioni sui continenti: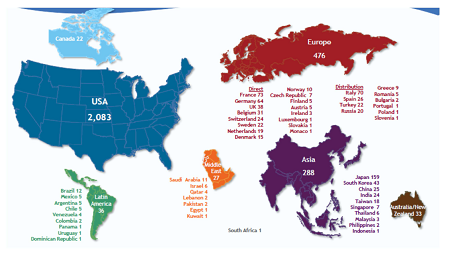
L’Italia conta, ad oggi, 76 installazioni.
In Italia, nel 2014 si sono effettuati più di 11mila interventi con un incremento rispetto al 2013 del 20% .
Vantaggi della chirurgia robotica
Numerosissimi sono i benefici confrontati alla chirurgia tradizionale e alla laparoscopica. Benefici che valgono per il chirurgo e per il paziente.
I principali vantaggi clinici ed operatori nell’utilizzo di questa tecnica sono:
- Accesso facilitato anche verso anatomie nascoste
- Perfetta visione dei reperi anatomici
- Visione al dettaglio dei piani di clivaggio
- Precisione durante la demolizione e ricostruzione
- Precisione nella configurazione l’accuratezza del movimento chirurgico.
I vantaggi per il paziente:
- Incisioni piccole, sanguinamento modesto
- Necessità ridotta di trasfusioni
- Riduzione del dolore postoperatorio
- Minor tempi di ospedalizzazione
- Recupero più veloce
- Miglior effetto cosmetico
Per quanto concerne infine la chirurgia del retto, la tecnica robotica con il sistema da Vinci offre numerosi benefici rispetto alla chirurgia tradizionale. Tra questi:
- Eccellenti risultati clinici ed oncologici relativi al controllo del tumore1
- Ritorno alla normale alimentazione in tempi più brevi
- Riduzione dei giorni di ospedalizzazione2
- Tempi di recupero veloci1
- Riduzioni delle complicanze maggiori2
1 Hellan M, Anderson C, Ellenhorn JD, Paz B, Pigazzi A. Short-Term Outcomes after robotic-assisted total mesorectal excision for
rectal cancer. Annals of Surgical Oncology. 2007 10;1245.
2 Baik et al., Robotic versus laparoscopic low anterior resection of rectal cancer: Short-term Outcome of a prospective comparative
study. Annals of Surgical Oncology. 2009 DOI 10.1245/s10434-009-0435-3